一、研究背景
在地基望远镜的观测过程中,目标发出的光在到达成像系统前会受到大气湍流干扰,使其光波的相位发生随机扰动,最终导致成像的畸变。在地基望远镜成像系统加工和部署前,建立整个系统的数字孪生模型,能够提升其生产和测试效率并为其故障诊断提供依据,并且在此系统数字孪生模型建立的过程中,大气湍流随机干扰的高保真数字孪生模型是一个关键技术。为了复现大气湍流随机干扰,引入数字孪生技术对大气湍流相位屏在数字空间内完成全要素重建,之后,在地基望远镜成像系统设计、加工和应用前,该技术能够提升成像系统的生产和测试效率,并为成像系统故障诊断提供依据。目前,深度神经网络发展迅速,其能够直接从数据中对非常复杂的函数建模,并能直接对样本数据进行统计、分析,从而学习到样本的内在规律。由于深度神经网络如此强大的拟合能力,在大气湍流模拟任务中,深度神经网络比普通模拟方法更具有优势。综上所述,我们完全可以使用深度神经网络构建大气湍流相位屏的数字孪生,并利用其优势生成高精度、可接受速度以及与真实测量结果高度近似的无限长相位屏。
二、整体框架
我们提出的基于深度神经网络大气湍流随机干扰数字孪生方法包括三个不同的部分:
1、第一部分为测量值分解部分(Rand-Net),这一部分能够在预先定义基函数的情况下,将测量或者模拟得到的大气湍流相位屏分解为随机数特征向量;
2、第二部分为大气湍流相位屏生成部分(Phs-Net),这一部分能够从预先定义基函数的随机数中生成大气湍流相位屏;
3、第三部分为大气湍流随机数生成部分(Next-Net),这一部分能够从数据中学习到时间统计特性,根据给定的随机数生成下一阶段相位屏的随机数。
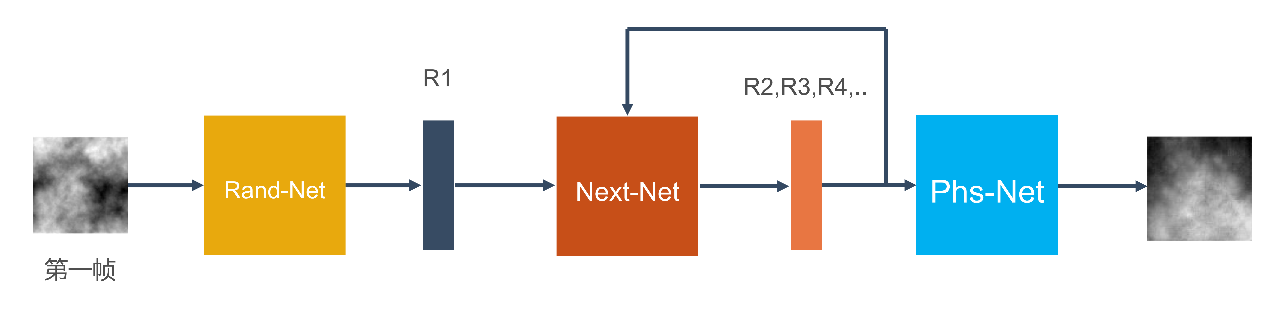
这些不同的部分在开发阶段是经过独立的训练和测试的,可以独立使用,也可以按照如下的框架集成在一起使用。整个框架的工作过程如下:模拟或真实测量的第一帧相位屏首先被 Rand-Net 分解为随机数 特征向量R1 作为种子,然后 Next-Net 会根据 R1的输入来输出下一阶段的随机数种子 R2, 之后 R2 输入到 Phs-Net 生成第二帧的相位屏 F2,同时,R2 会输入到 Next-Net 生成 R3,R3 输入到 Phs-Net 生成 第三帧相位屏F3,以此过程往复下去,直至生成无限长的相位屏。
三、数据采集介绍
我们的数据集分为两种:第一种是模拟数据,如基于均匀采样的功率谱反演法、非均匀采样快速傅里叶变换法、叠加法等;第二种是从真实测量的斜率数据利用区域法复原得到的相位屏。
1、采集模拟数据
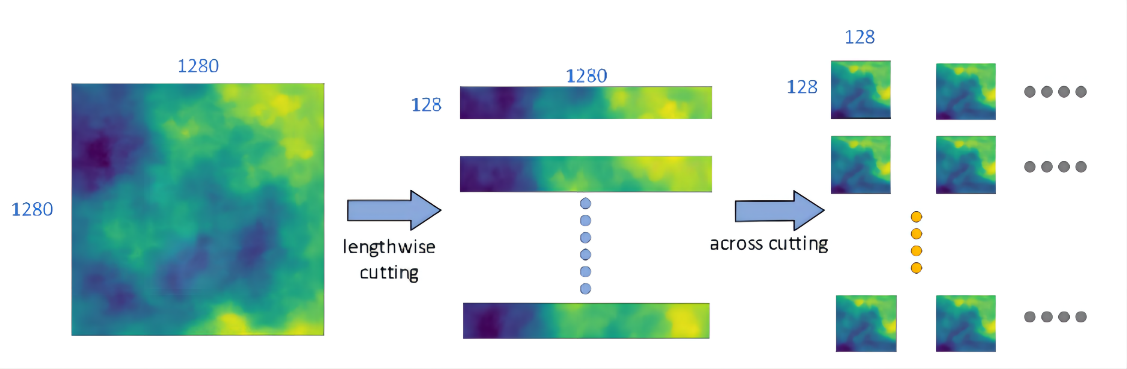
由于叠加法精度相对较高,所以将叠加法生成的相位屏作为数据集。为了得到具有时间相关性的连续小屏,我们从一个大尺寸屏(1280*1280)中分割出连续的小屏(128*128),分割方法如下图所示。
2、真实测量数据采集
搭建整个蒙特卡罗模型采集斜率数据,如下图所示,根据区域法复原出连续相位屏。

四、网络介绍
1、Rand-Net结构
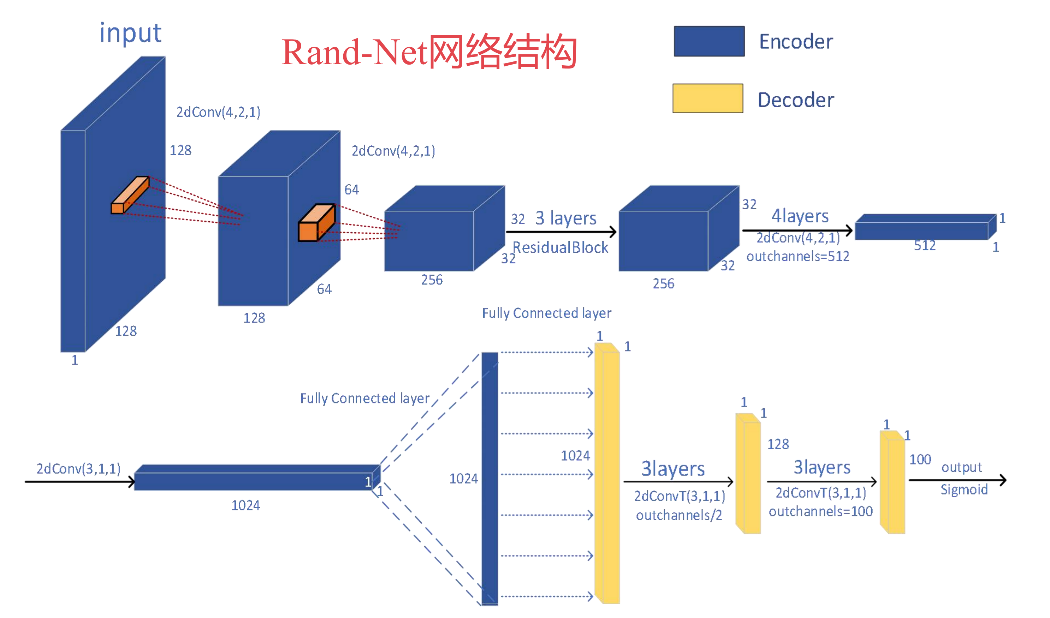
Rand-Net 的结构框图如下图所示,其包括蓝色的编码器部分和黄色的解码器部分。Rand-Net 将会根据预定义的基函数根据输入大气湍流随机干扰相位屏幕输出一个随机数向量。假设输入的大气湍流相位屏大小为 K×K 像素,输出的随机数向量为 s×1像素。但在实际的应用中,随机数向量的尺寸大小和大气湍流相位屏的像素大小是任意的。因此可根据需要相应的修改输入层的大小和其他层的大小。本网络能提取相位屏的随机数特征向量,将相位屏转换到一个正交且易于计算的值域,减少计算量。
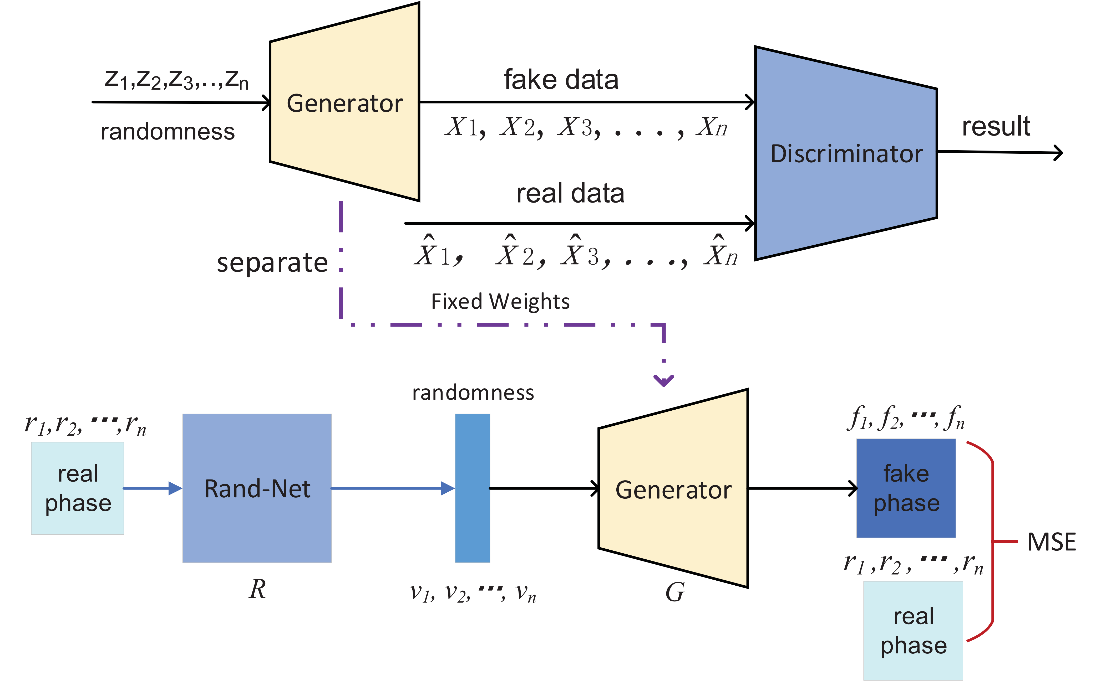
Rand-Net的训练过程如下图所示,已经训练好的Phs-Net中的生成器G将直接被取出,导入G的训练权重并固定,然后将G与Rand-Net的输出层进行连接。首先,大气湍流相位屏将会被输入到Rand-Net中,之后产生随机数向量;然后随机数向量将会被输入到固定权重参数的生成器G中去生成大气湍流相位屏;最后将计算生成器G生成的大气湍流相位屏与原始相位屏之间的误差,使用均方误差(Mean Squared Error,MSE)作为损失函数来训练Rand-Net。使用4000个相位屏和相应的随机数向量作为Rand-Net的训练集。采用Adam算法优化器来优化整个网络。Batch Size的大小设置为20,每个epochs有200个Batches。
2、Next-Net结构
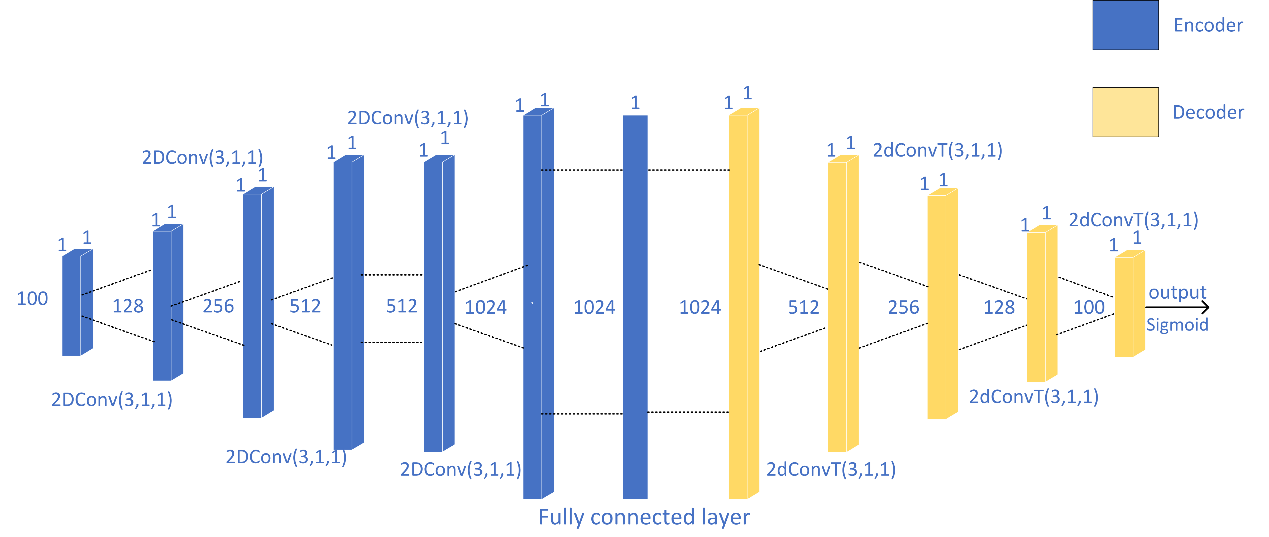
Next-Net是基于自编码器的深度神经网络,其输入是前一阶段的大气湍流相位屏的随机数向量,输出是下一阶段大气湍流相位屏的随机数向量。Next-Net网络的结构如下图所示,其中蓝色的部分为编码器部分,黄色的部分为解码器部分。Next-Net输入和输出的随机数向量的尺寸均为S×1,可以根据输入或输出的随机数向量的需求尺寸去调整Next-Net的网络结构。Next-Net网络的最后一层即输出层使用Sigmoid函数作为激活函数,其余网络层的激活函数均采用Leaky ReLu函数,其负值斜率参数为0.2。
3、Phs-Net结构
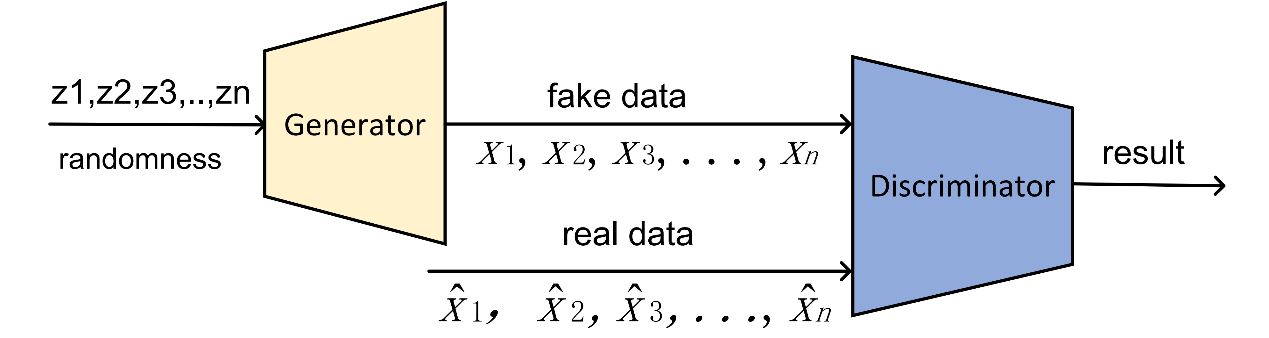
大气湍流相位屏生成网络(Phs-Net)的作用是生成给定大小的大气湍流相位屏。Phs-Net网络的结构如下图所示,此网络结构包括两个部分:生成器(Generator,G)和判别器(Discriminator,D)。通过训练生成器和判别器,就能够获得一个有效的生成器,最终输入随机数向量,就可以生成高保真的大气湍流相位屏。
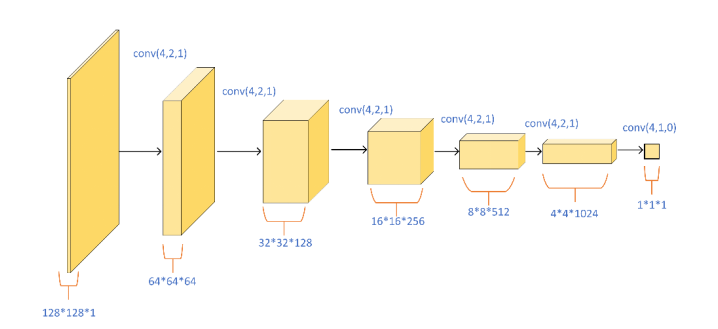
Phs-Net中的生成器G是一个深度转置卷积神经网络,生成器G能根据给定的一组随机数生成一个相位屏,其结构如下图所示。在此结构中,设定输入随机数的维度为S×1像素,输出的相位屏大小为K×K像素。对于不同大小的相位屏,可以根据实际需要调整网络结构。
Phs-Net中的判别器D是一个深度卷积神经网络,其作用是输出生成相位屏和真实相位屏之间的相似性。D的结构图如下图所示,D输入的生成器G生成的大气湍流数据和标签图像数据尺寸大小为K×K,输出为损失函数的输出,尺寸为1×1。
五、测试结果展示
1、模拟数据集结果展示
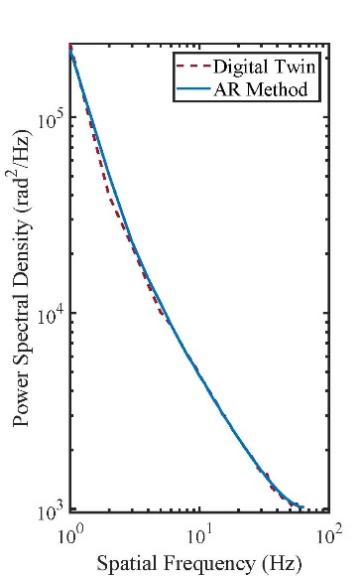
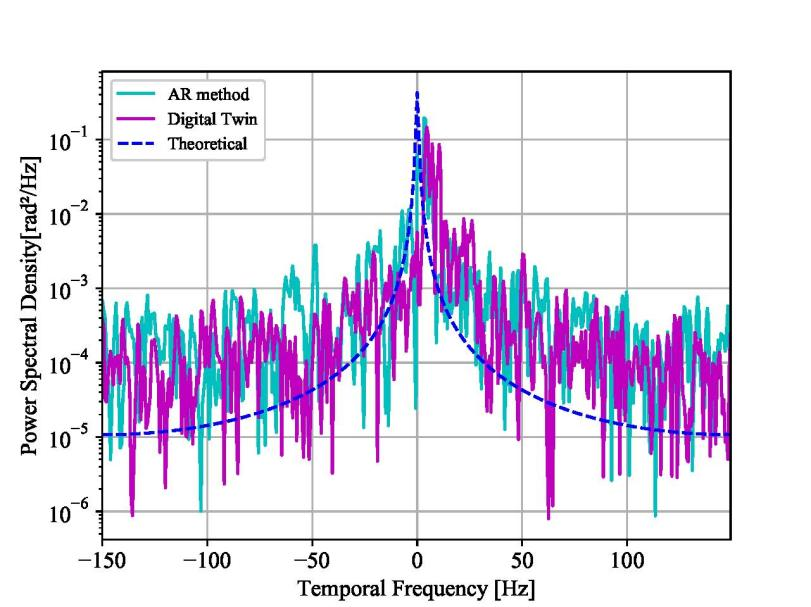
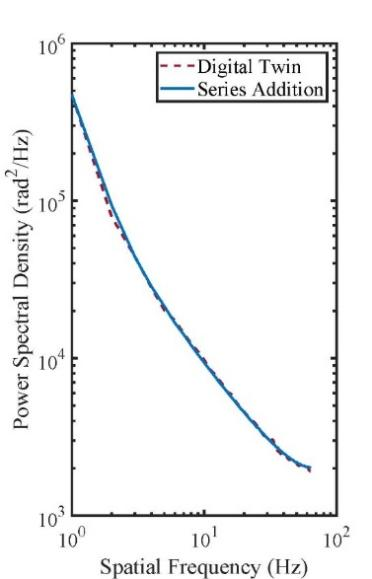
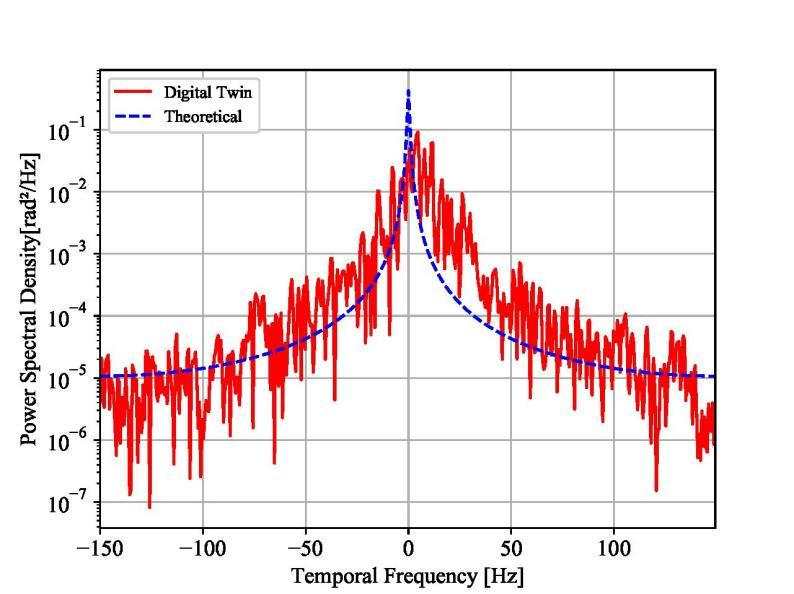
用模拟数据进行训练后,输出连续的大气湍流相位屏,通过对空间功率谱进行对比,可以得出深度神经网络能够输出高精度的相位屏;通过对时间功率谱进行对比,可以得出深度神经网络能够输出具有时间相关性的连续相位屏。
2、真实数据集结果展示
用真实测量数据进行训练并测试,结论与第一种情况相同。说明深度神经网络能够数字孪生出真实的大气湍流相位屏,并且可以作为一个模块用于地基望远镜成像系统的数字孪生中。